 Fraunhofer Institute for Digital Medicine MEVIS
Fraunhofer Institute for Digital Medicine MEVISIn-silico studies using numerial simulation
To assess the capabilities of the TTS in terms of motion compensation accuracy, we performed an in-silico validation where the linear prediction based on most recent observation samples was compared to the history based motion prediction method. Furthermore, different emulated real-time and preset-based transducers with a varying number of available preset configurations are evaluated for their effect on the motion compensation. For this, the numerical simulation has been improved in TRANS-FUSIMO. Also, the system parameters like monitoring image duration or ultrasound shot duration have been varied in the in-silico validation studies.
As a metric for the study, we calculate the efficiency drop between a sonication in a moving scenario and in the corresponding static experiment. The fraction between the peak temperature rises of the moving and of the static scenario is then the efficiency metric. This metric lies in the range between 0% and 100%.
We use the peak temperature rise at the planned target position as a further metric for our studies as the therapy would yield good results only if the focus in the moving case is both as sharp as in the static case and at the correct location. Assessing an average over a region around the target might underestimate an unintended focus dislocation.
In the in-silico study we could show that the temporal motion prediction is the most influential component. The history-based motion prediction is found to perform better than a linear-extrapolation-based predictor. We, however, see the potential for improving the temporal predictions with the spatio-temporal motion model for liver motion from ETH which was not included in the in-silico study.
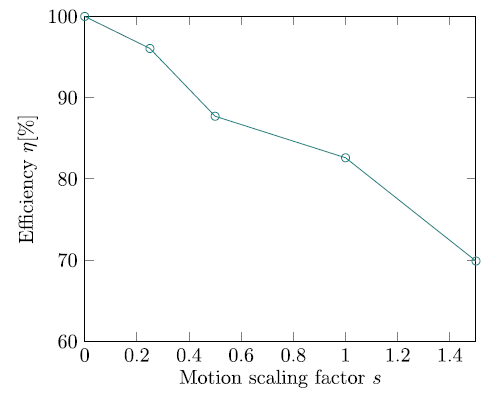
A virtual model of the actual hardware system with the same specifications as the current hardware implementations in TTS (150 ms monitoring imaging delay, 150 ms image duration, 64-preset transducer) is tested and found to be capable of motion compensation of normal respiratory motion with an efficiency above 80% for normal motion (s = 1). For exaggerated motion (s = 1.5) the efficiency goes down to about 70%.
